
25.1: Introduction to Synthetic Biology
- Page ID
- 41085
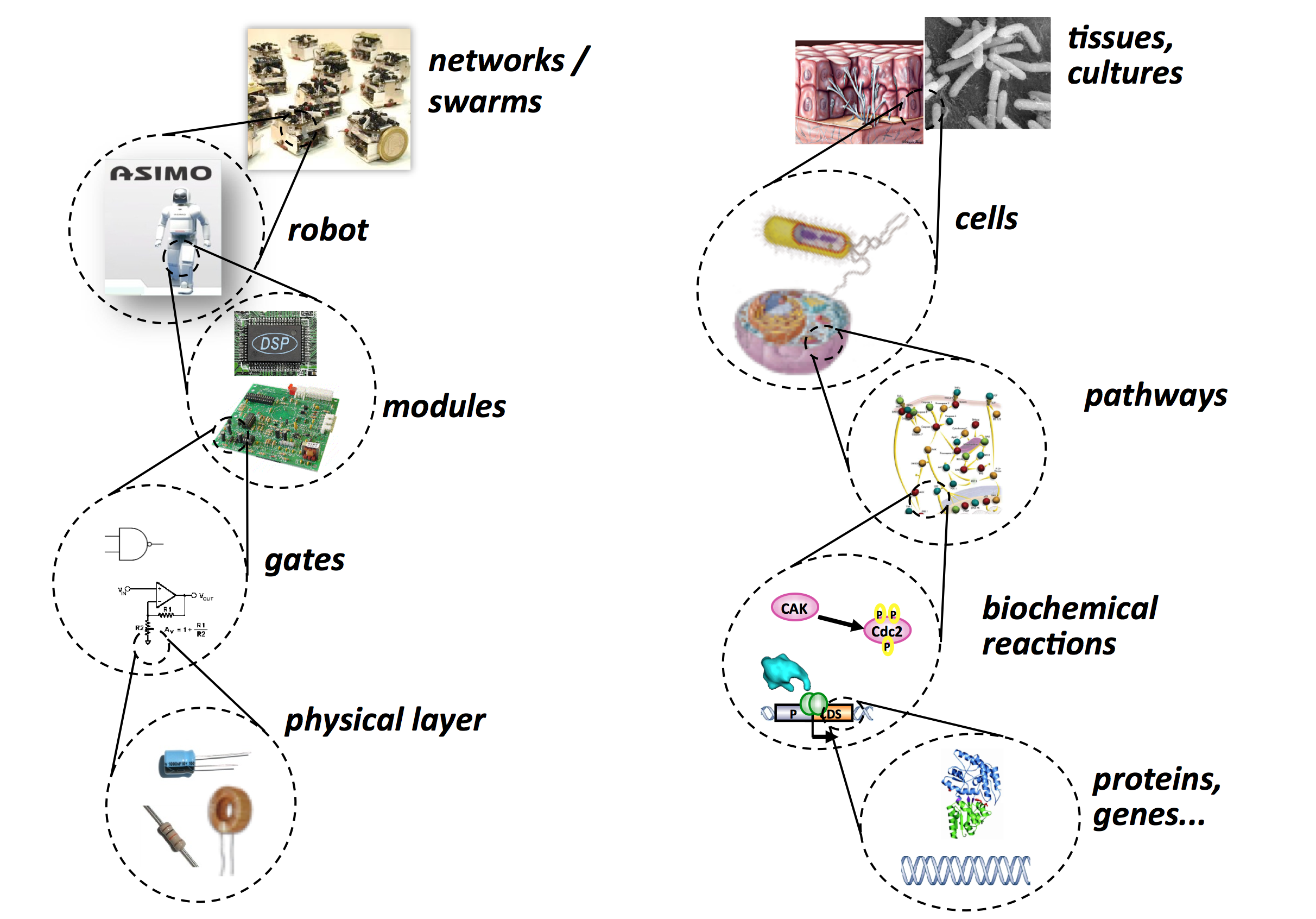
A cell is like robot in that it needs to be able to sense it surroundings and internal state, perform computations and make judgments, and complete a task or function. The emerging discipline of synthetic biology aims to make control of biological entities such as cells and proteins similar to designing a robot. Synthetic biology combines technology, science, and engineering to construct biological devices and systems for useful purposes including solutions to world problems in health, energy, environment and, security.
Synthetic biology involves every level of biology, from DNA to tissues. Synthetic biologist aims to create layers of biological abstraction like those in digital computers in order to create biological circuits and programs efficiently. One of the major goals in synthetic biology is development of a standard and well- defined set of tools for building biological systems that allows the level of abstraction available to electrical engineers building complex circuits to be available to synthetic biologists.
Synthetic biology is a relatively new field. The size and complexity of synthetic genetic circuits has so far been small, on the order of six to eleven promoters. Synthetic genetic circuits remain small in total size (103 - 105 base pairs) compared to size of the typical genome in a mammal or other animal (105 - 107 base pairs) as well.
Source: Andrianantoandro, Ernesto, et al. "Synthetic Biology: New Engineering
Rules for an Emergin Discipline." Molecular Systems Biology 2, no. 1 (2006).
Figure 26.1: The layers of abstraction in robotics compared with those in biology (credit to Ron Weiss).
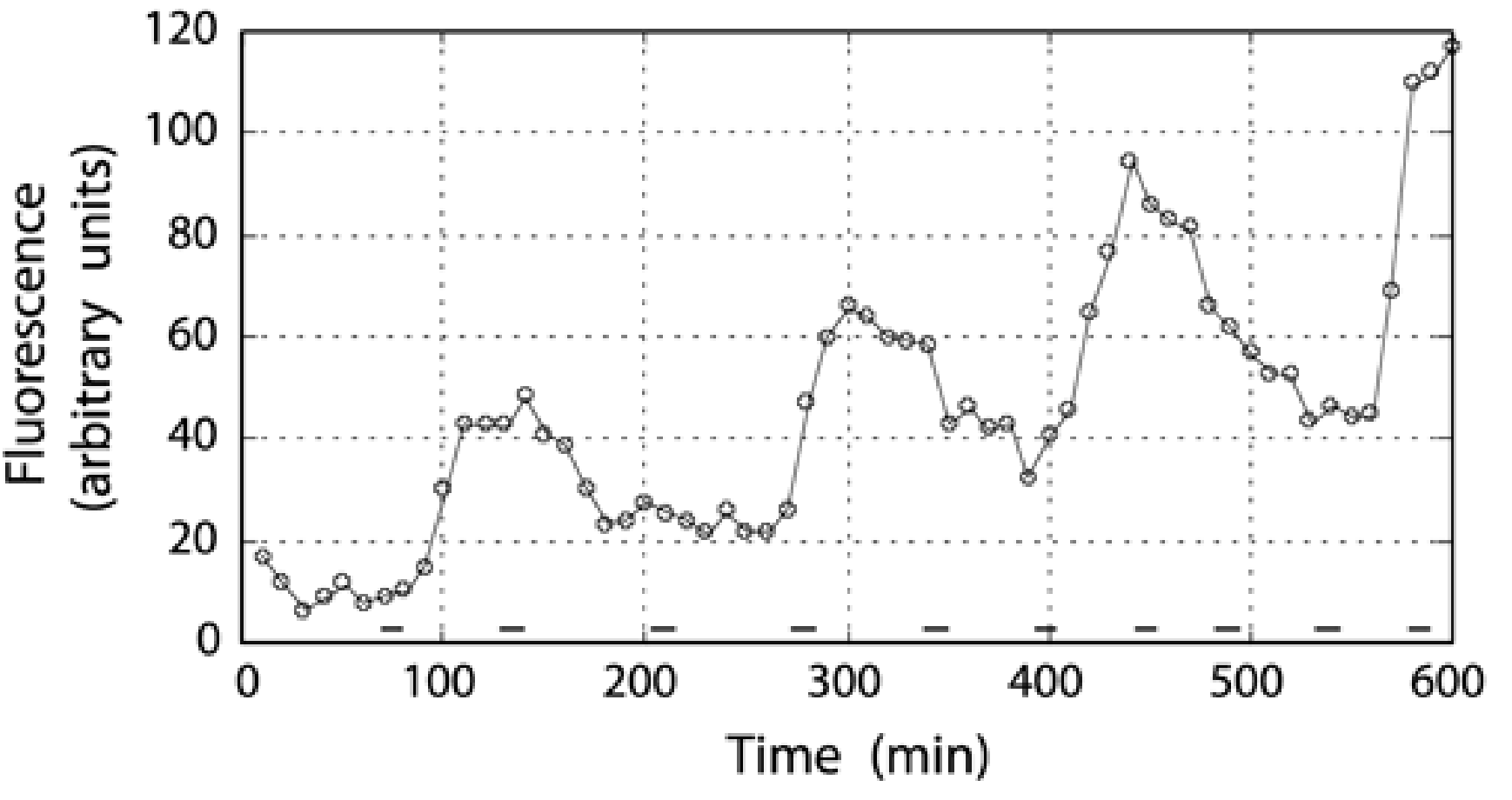
One of the first milestones in synthetic biology occurred in 2000 with the repressilator. The repressilator [2] is a synthetic genetic regulatory network which acts like an electrical oscillator system with fixed time periods. A green fluorescent protein was expressed within E. coli and the fluorescence was measured over time. Three genes in a feedback loop were set up so that each gene repressed the next gene in the loop and was repressed by the previous gene.

.png?revision=1&size=bestfit&width=718&height=380)
Source: Elowitz, Michael B. and Stanislas Leibler. "A Synthetic Oscillatory
Network of Transcriptional Regulators" Nature 403, no. 6767 (2000): 335-8.
Figure 26.3: Fluorescence of a single cell with the repressilator circuit over a period of 10 hours.
The repressilator managed to produce periodic fluctuations in fluorescence. It served as one of the first triumphs in synthetic biology. Other achievements in the past decade include programmed bacterial population control, programmed pattern formation, artificial cell-cell communication in yeast, logic gate creation by chemical complementation with transcription factors, and the complete synthesis, cloning, and assembly of a bacterial genome.